下载代码
git clone https://github.com/SIT-Robot/sit-robot-tools.git
编译代码
catkin_make
启动机器人键盘控制器
运行命令
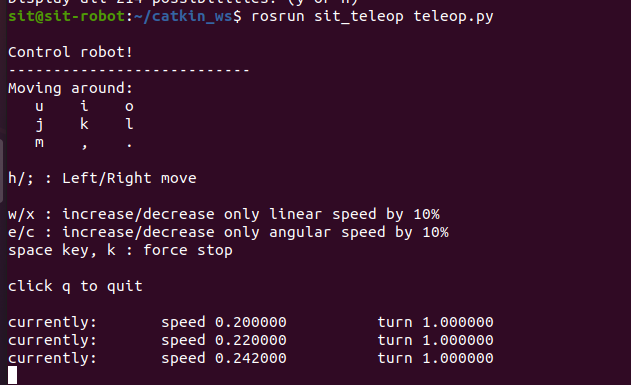
rosrun sit_teleop teleop.py
即可启动控制器如下,
git clone https://github.com/SIT-Robot/sit-robot-tools.git
catkin_make
运行命令
rosrun sit_teleop teleop.py
即可启动控制器如下,