服务机器人上的激光雷达的ROS驱动程序可直接通过apt进行安装。
sudo apt install ros-noetic-urg-node
然后使用命令
rosrun urg_node urg_node
便可以启动激光雷达节点
通过rostopic list即可查看所有的话题列表中包含了激光雷达节点发布的话题/scan了
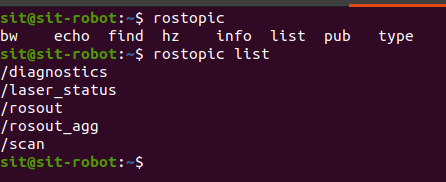
使用rostopic echo /scan即可查看/scan话题下发布的数据流。
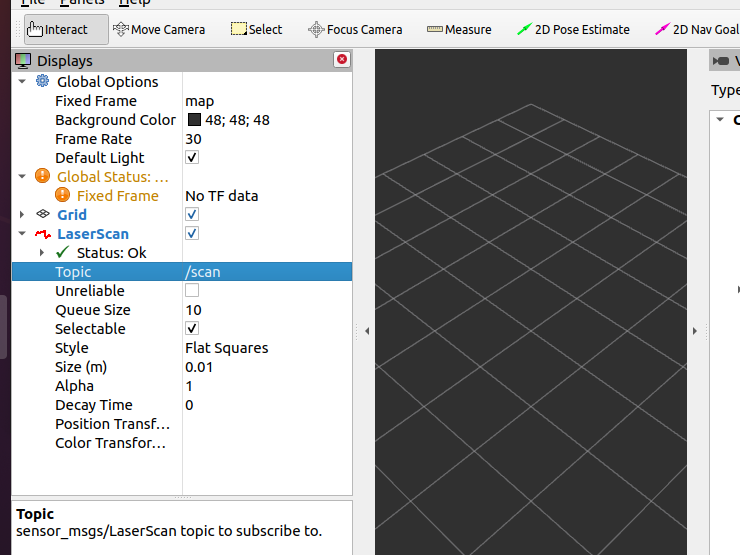
也可在rviz的可视化工具中,添加LaserScan可视化组件
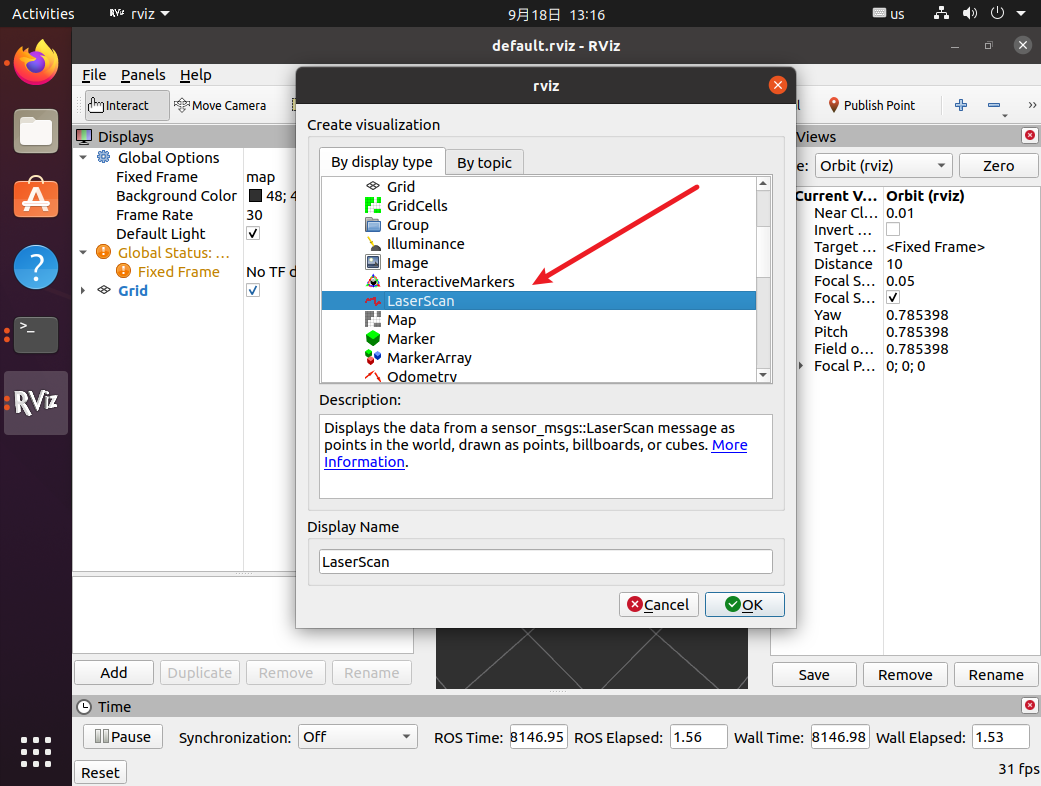
设置该可视化组件绑定的话题为/scan,然后便可在右侧三维空间中显示当前的激光雷达点云信息。(可能还需要设置全局坐标系为激光雷达的坐标系,默认为地图坐标系,但是地图此时还未加载)