建议
还是建议在完成了下面文章和视频的学习之后再进行本章的学习,如果能完整的学习完该视频与文档,那么本篇文章可能很快就能完成甚至发现文章中的疏漏。
第 7 章 机器人导航(仿真) · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
还有配套视频
https://www.bilibili.com/video/BV1Ci4y1L7ZZ
P229-P328章节
本人当时学习完这些章节且搭建出自己的机器人仅需一天时间即可完成
克隆代码
git clone https://github.com/SIT-Robot/sit-service-robot.git
git clone https://github.com/SIT-Robot/sit-basketball-robot.git
编译代码
catkin_make
有可能报错如下,
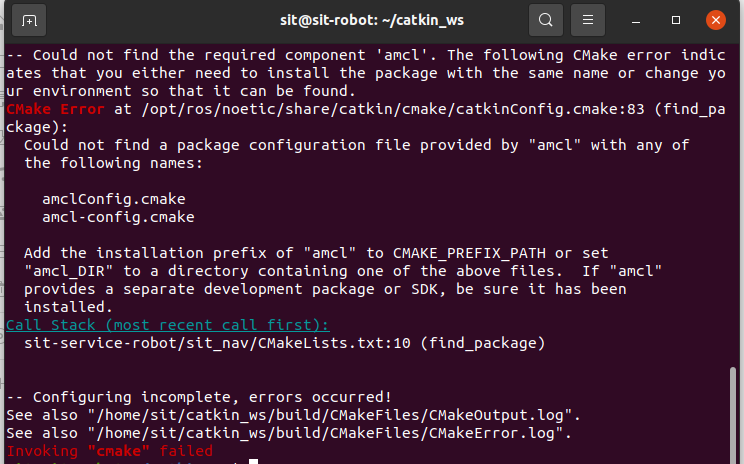
sudo apt install ros-noetic-navigation
sudo apt install ros-noetic-gmapping
启动环境
此时启动机器人仿真环境
可能报错如下,我们需要安装urdf的python插件
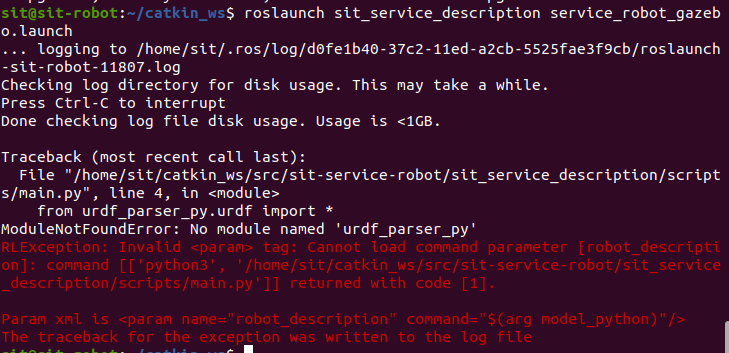
sudo apt install ros-noetic-urdfdom-py
再次启动仍可能报错如下,我们需要安装realsense2_description包
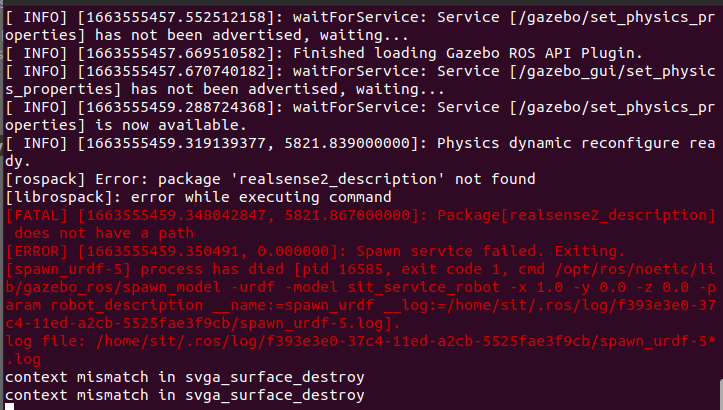
sudo apt install ros-noetic-realsense2-description
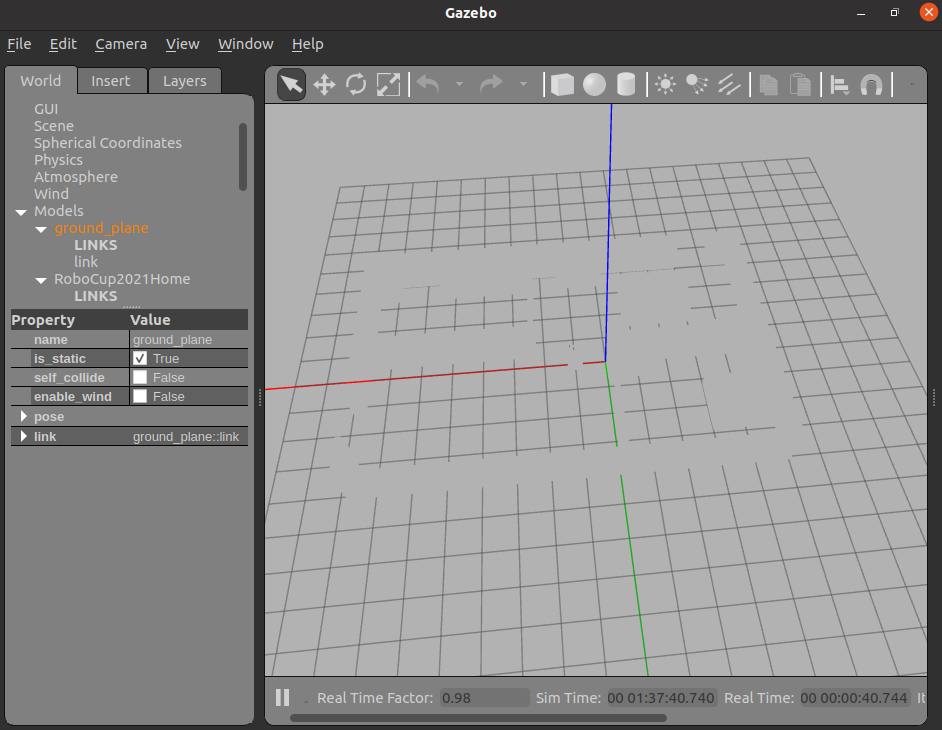
此时已经成功启动机器人仿真环境,但是可能效果如下,显示异常
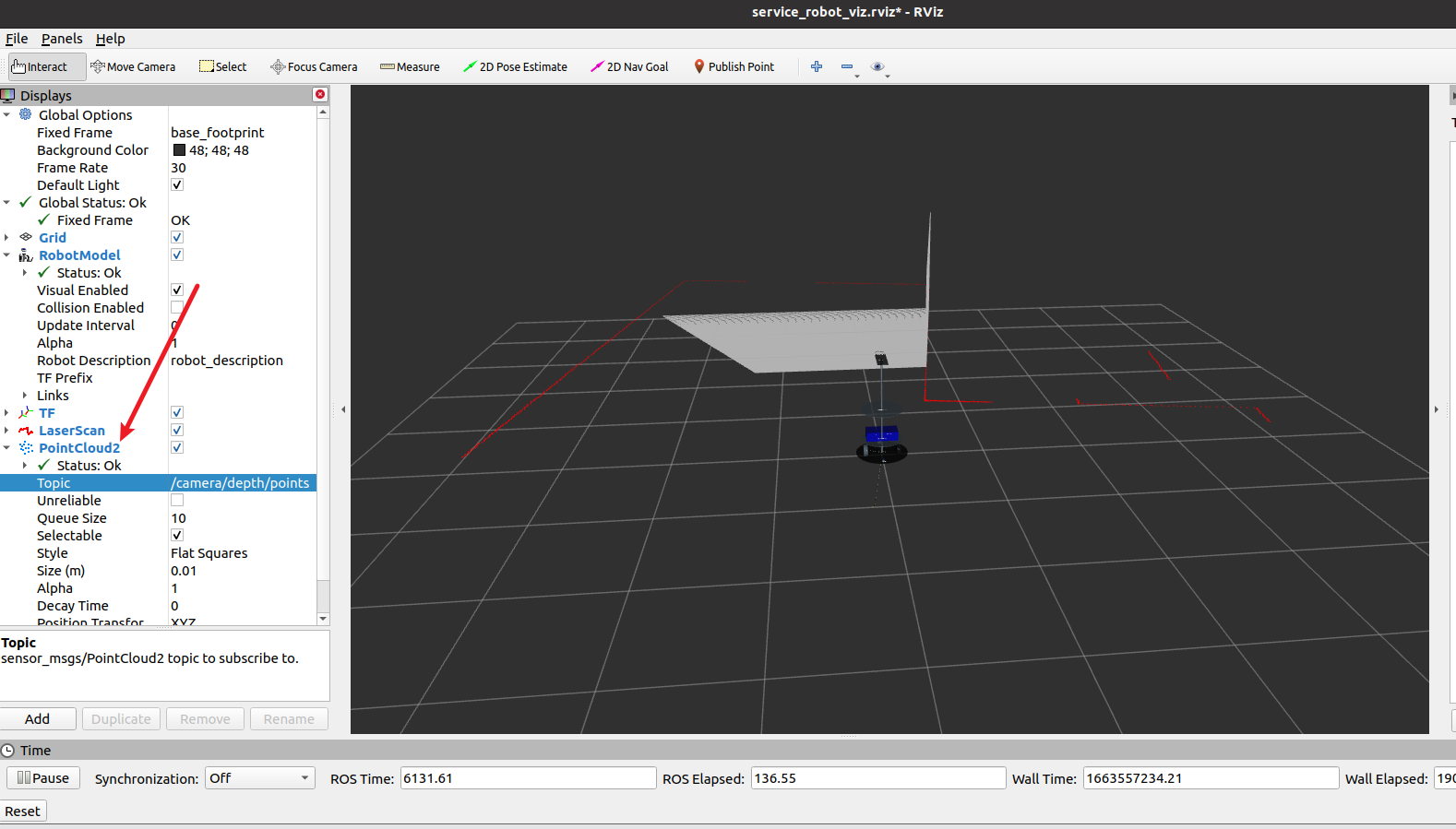
使用roslaunch sit_service_description service_robot_viz.launch打开rviz查看
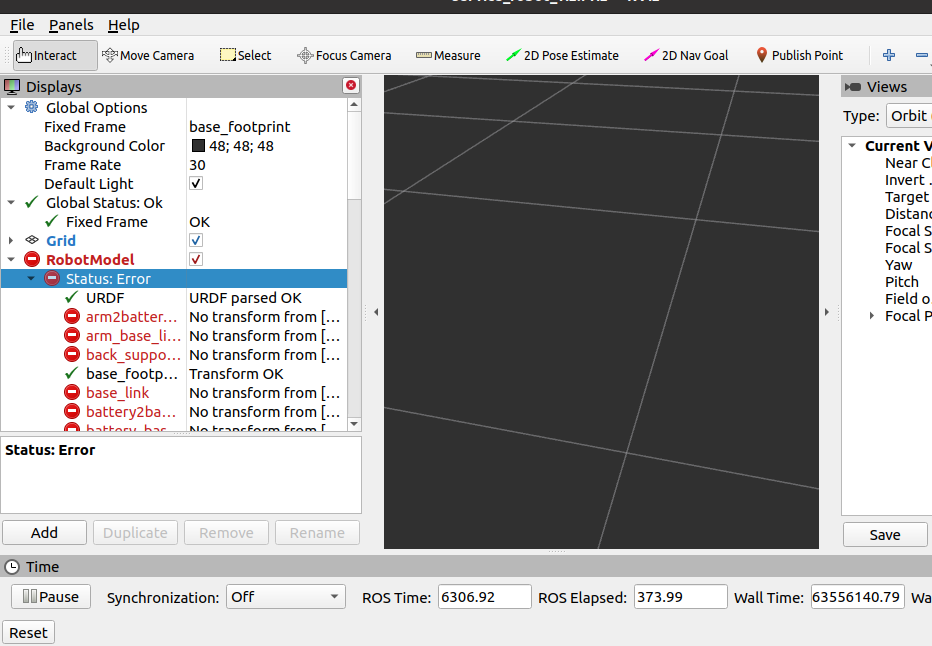
发现似乎是tf全部失效。
根据以下文章,查看tf树
5.1.5 坐标系关系查看 · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
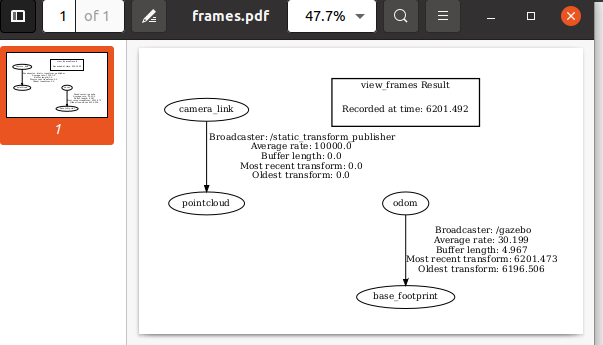
发现目前仅存在上述tf变换。
重开几次,有一定几率建立完整tf
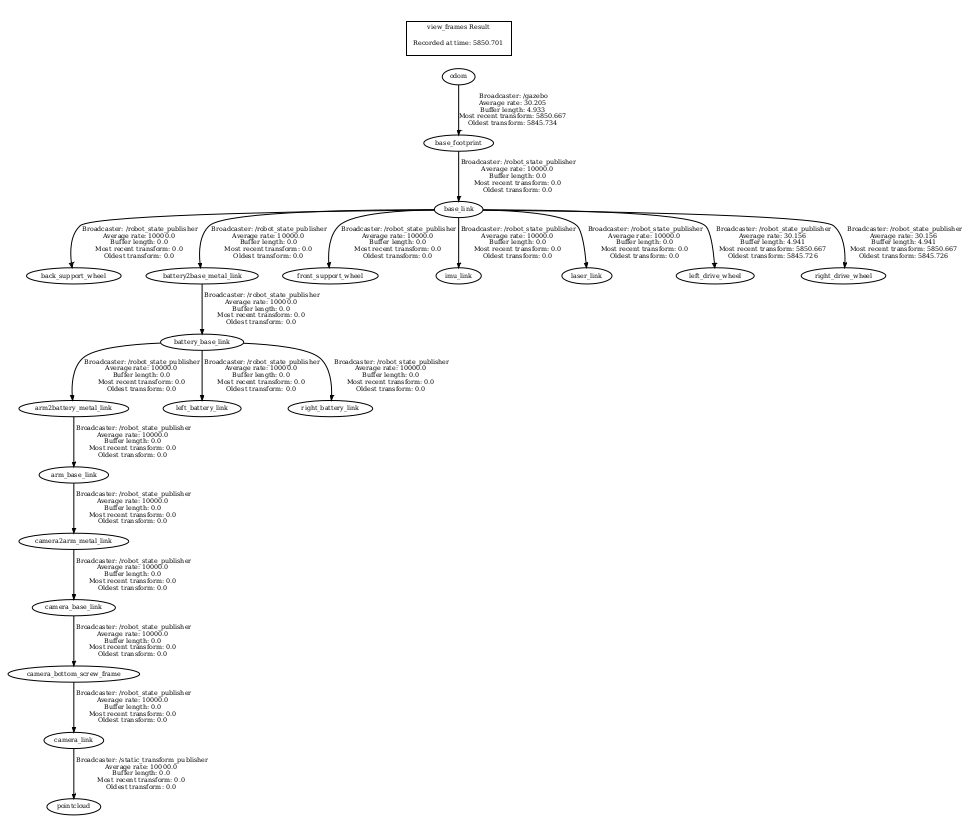
此时继续启动service_robot_viz.launch,可发现机器人已经成功加载,并且显示出模型,雷达线等。
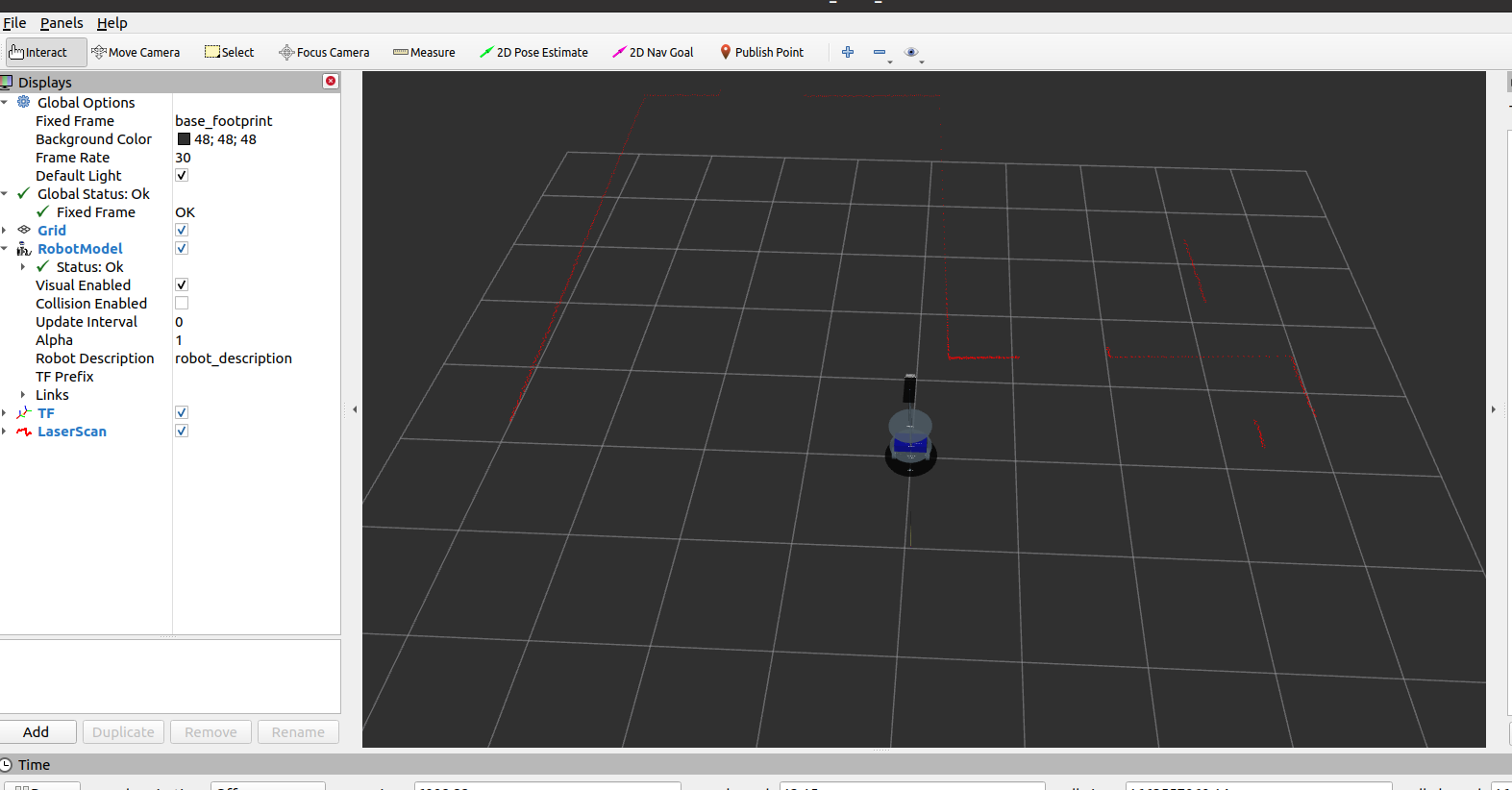
如果电脑性能较好,还可尝试订阅深度相机发布的点云消息,
启动键盘控制器
启动键盘控制器
rosrun sit_teleop teleop.py
即可使用键盘控制rviz中的机器人了。
PS: Gazebo中的场景贴图还是无法正常加载,我也不清楚为何,或许是虚拟机的问题。但是rviz中已经实现了机器人的可视化,并显示周围的环境感知。
SLAM建图
roslaunch sit_nav gmapping_slam.launch 即可启动slam建图,使用键盘控制机器人运动,即可逐步建立环境地图。